カワサキの「4脚歩行」モビリティが製品化に向け開発着手 2030年開催予定の「サウジアラビア・リヤド万博」会場内モビリティ採用目指す
川崎重工は2025年12月3日に、2025年日本国際博覧会(大阪・関西万博)で展示した新感覚オフロードパーソナルモビリティ「CORLEO(コルレオ)」について、製品化に向けた開発に着手したと発表しました。
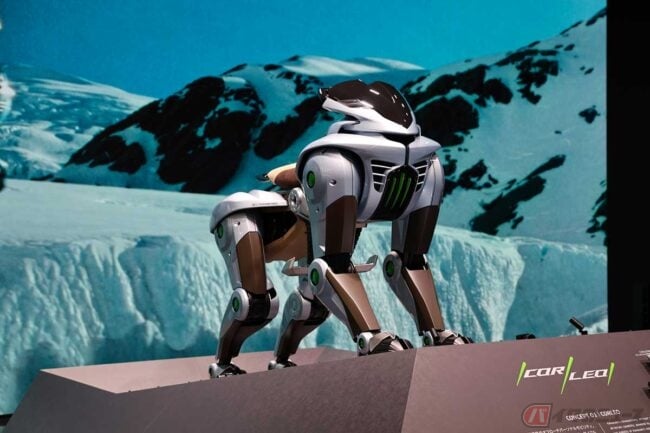
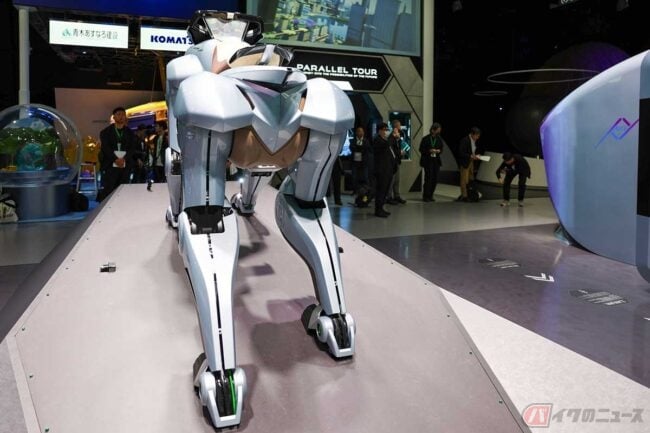
新感覚オフロードパーソナルモビリティ「CORLEO」
川崎重工は2025年12月3日に、2025年日本国際博覧会(大阪・関西万博)で展示した新感覚オフロードパーソナルモビリティ「CORLEO(コルレオ)」について、製品化に向けた開発に着手したと発表しました。
この開発は社長直轄のプロジェクトとして推進され、専任組織として「SAFE ADVENTURE事業開発チーム」が立ち上げられました。2030年に開催が予定されている「サウジアラビア・リヤド万博」において、会場内モビリティとしての採用を目指すとともに、2035年の製品化に向けた開発に取り組んでいくとしています。
また、CORLEOの製品化実現にあたり、4脚型モビリティの乗車体験を可能にするライディングシミュレータの開発も並行して行われます。このシミュレータは2027年中の完成を目標としており、開発過程で得られる3Dモデルやモーションデータを含むシステム全体を、将来的にはゲーム、eスポーツ業界へ展開することも視野に入れているといいます。

CORLEOは、ロボット事業とモーターサイクル事業を持つ川崎重工グループの技術を結集して実現を目指す、4脚型のオフロードパーソナルモビリティです。2025年の大阪・関西万博の未来社会ショーケース事業「フューチャーライフ万博・未来の都市」でコンセプトモデルが初披露されると、SNSで累計約12億リーチを達成するなど、大きな注目を集めました。
主な特長として、ロボティクス技術がもたらす4脚ならではの優れた悪路走行性能と、モーターサイクルで培われた高い操縦性および安定性を両立させている点が挙げられます。後脚部には、モーターサイクルで培ったスイングアーム機構が応用されており、脚が独立して上下動することで路面からの衝撃を効果的に吸収します。これにより、ライダーは進行方向の地形を確認しやすい安定した姿勢を保つことが可能です。
操縦は乗馬のように重心移動によって行い、サポート機能も備えることで、誰でも簡単に山岳地帯や水場といった難地形を安全に走行できることを目指しています。動力源には環境に配慮し、「水素」を燃料とする「水素エンジン」で発電する構造が採用されています。
CORLEOの開発は、誰もが安全に安心して山岳地を楽しめ、山岳事故ゼロを目指す「SAFE ADVENTURE」というコンセプトの中核プロジェクトとして位置づけられています。このコンセプトに基づき、天候や気温、路面状況、さらには野生動物の出現といった情報を検知し、スマートフォンなどのデバイスを通じて安全なルートを案内するナビゲーションシステムの開発も進められます。
この「SAFE ADVENTURE」の取り組みは、川崎重工グループが掲げる「グループビジョン2030」における3つの注力フィールド、「安全・安心リモート社会」、「近未来モビリティ」、「エネルギー・環境ソリューション」のすべてに合致するものです。同社は本事業を通じて、自然との調和を図りながら、誰もが安全・安心して山岳地帯を楽しめる社会の実現に貢献していくとしています。